智能识别控制实验室建于2023年9月,设在第2教学楼210,面积约28平米。
AI 智能物联终端深度学习视觉开发平台2套:主要由协作机器人、机器人智能控制器、双目立体视觉检测系统、工业智能视觉检测系统、柔性自动化系统等组成,平台融合了物联网、机器视觉、深度学习、系统建模和机器人控制技术,具有软硬件开源、课程个性化可定制的人工智能与机器人综合性开发实训平台,可以满足教师科研以及学生创新性教学与实践需求。
计算机智能物联终端深度学习及视觉孪生研发平台包含智能物联终端系统、智能控制系统、机器视觉、智能孪生系统等部分。智能物联终端关节模组可构建2至7轴串并联智能物联终端;开源协作智能物联终端模块,能够实现机械臂运动学仿真。智能视觉检测系统应需支持多种视觉需求,包含测量、检测、识别、定位等功能。智能孪生系统由终端设备本体、3D相机、定制化的末端执行器、深度学习工作站、无序抓取智能算法及其他配套非标设备组成。智能控制系统采用物联感知模块、数据网关、中间件和柔性智能模块集成顺序控制流程与通讯监控方案,连接PLC、变频器、温控器等控制元件,有效的满足需考量成本又兼顾可靠度及智能化的控制解决方案。
实验室的主要研究领域和研究方向包括人机工程设计,柔性系统,神经网络机器识别算法,机械臂运动学及动力学模型开源视觉抓取应用算法,多品类物体无序抓取算法研究。
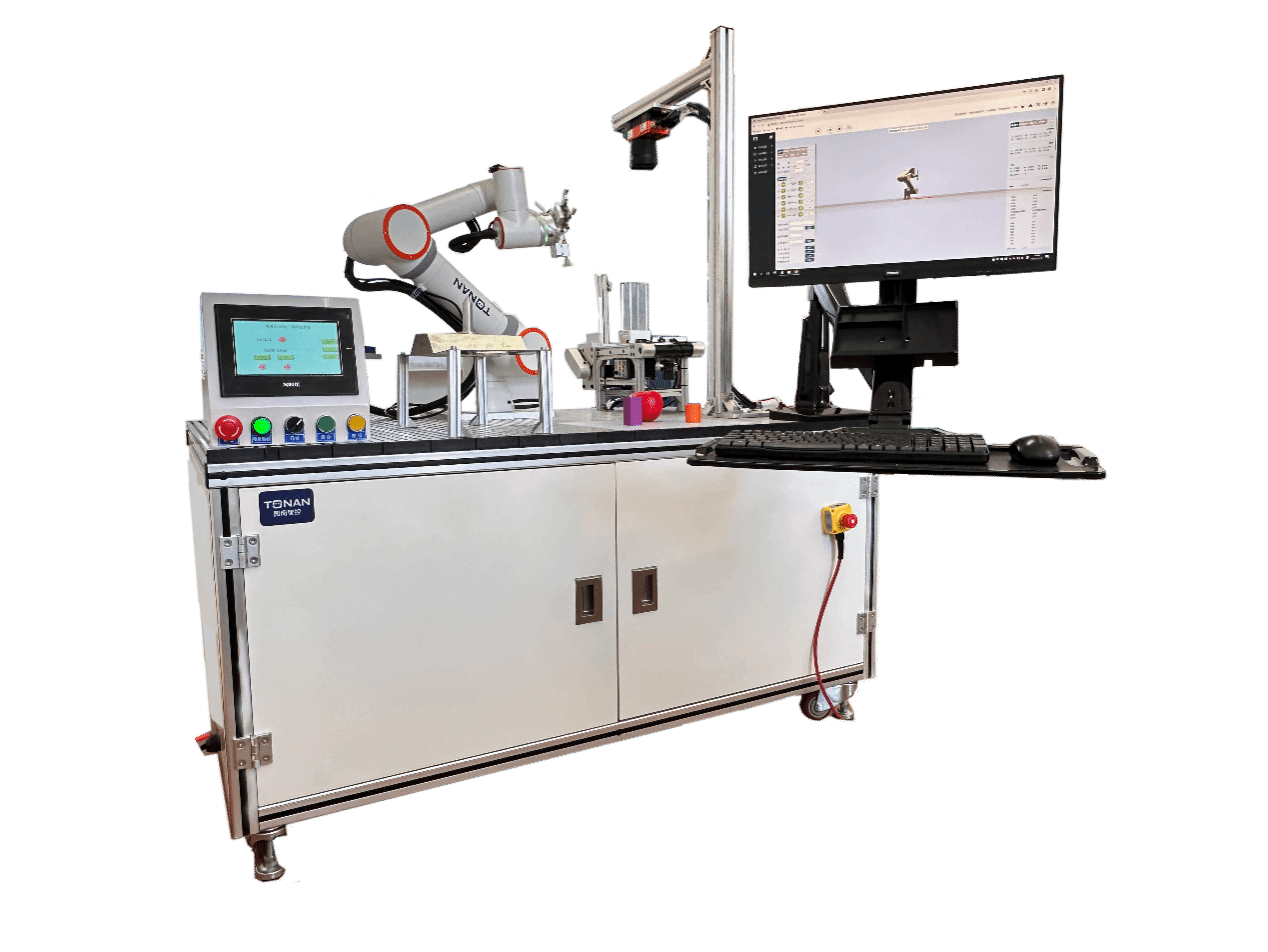
AI 智能物联终端深度学习视觉开发平台
AI 智能物联终端深度学习视觉开发平台主要由由协作机器人、机器人智能控制器、双目立体视觉检测系统、工业智能视觉检测系统、柔性自动化系统等组成,平台融合了物联网、机器视觉、深度学习、系统建模和机器人控制技术,具有软硬件开源、课程个性化可定制的人工智能与机器人综合性开发实训平台,可以满足教师科研以及学生创新性教学与实践需求。
产品特点:
l 人机工程设计,方便实验教学;
l 柔性系统,支持多种应用扩展;
l 硬件接口开放,支持二次开发控制系统支持多种编程语言;
l 支持多品类物体无序抓取;
l 开源机械臂运动学及动力学模型开源视觉抓取应用算法;
l 开源神经网络机器识别算法。